
HAPTION INCA 6D 力反馈装置
INCA 6D为一款6自由度触觉装置,设计专用于虚拟现实环境。

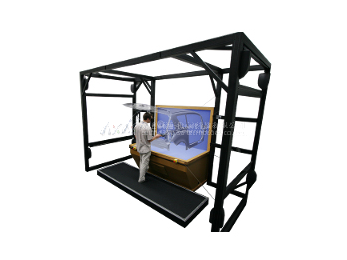
INCA 6D设备工作区
INCA 6D由高度电机模块组成,工作区取决于电机模块的位置。例如,在3mx3mx3m的立方结构内,工作区将为1.50x1.50x1.50m ,在所有方向上可独立旋转+ / -40。由此,触觉接口是一个6自由度的移动设备,在所有方向上提供力反馈。位置分辨率为0.2mm。
模块化
用户使用位于顶端的夹持器或手柄(称为“效应器”)持有触觉装置。末端效应器容易拆卸和更换,因而可以频繁更换工具,以实现定制应用并加强沉浸感觉。夹持工具配备有3个按钮。其中一个按钮键专为补偿功能设计(见如下描述的控制系统功能)。其他按钮状态可使用VIRTUOSE API访问。
INCA 6D是当下市场中唯一的一款有如下特点的力反馈系统:
• 所有6自由度上的力反馈( 3个平移和3个旋转)
• 操作工作空间取决于电机和线缆的位置
• 超大力度为40N( 15 N连续),即提供足够高度模拟重物操作
• 超大旋转扭矩为5 Nm (1,5 Nm持续)
• 设备自身重量的精确静态补偿设
• 模块化末端效应器配备程控开关
• 夹持工具配备接近传感器,连接至一项“dead-man”功能:只要用户未在手中持有夹持工具,或者当用户松开手中的夹持工具时,电机将关闭,不会发生任何主动活动。
• 易于安装,仅需几分钟。易于组装和拆卸,这对于其他应用中继续使用房间非常重要。
• 主操作系统提供开发工具包(API)
• 证明与目前市场上的主流应用软件具有兼容性,可使用专用插件:VortexTM、HavokTM、ODE、VirtoolsTM、CatiaTM V5、OpenMask等。
• 兼容跟踪装置如ART
注意:Inca为基于Sato教授所创建的SPIDAR TM
归功于其大工作空间和高性能,该款设备与CAD数字化模型实现了一个成规模的互动。
主要应用领域包括:
• 人体工程学研究
• 可及性研究
• 装配仿真
• 项目审查
技术特征:
• 所有6自由度上的力反馈( 3个平移和3个旋转)
• 操作工作空间取决于电机和线缆的位置
• 超大力度为40N( 15 N连续),即提供足够高度模拟重物操作
• 超大旋转扭矩为5 Nm (1,5 Nm持续)
• 设备自身重量的精确静态补偿设
• 模块化末端效应器配备程控开关
• 夹持工具配备接近传感器,连接至一项“dead-man”功能:只要用户未在手中持有夹持工具,或者当用户松开手中的夹持工具时,电机将关闭,不会发生任何主动活动。
• 易于安装,仅需几分钟。易于组装和拆卸,这对于其他应用中继续使用房间非常重要。
• 主操作系统提供开发工具包(API)
• 证明与目前市场上的主流应用软件具有兼容性,可使用专用插件:VortexTM、HavokTM、ODE、VirtoolsTM、CatiaTM V5、OpenMask等。
• 兼容跟踪装置如ART
产品规格:
• 规格HAPTION INCA 6D 力反馈装置
• 传输线的超大力:37.5 N
• 传输线的连续力:12.5 N
• 传输线的卷绕长度:2.5米
• 预张力电缆的力度值:5 N
• 预张力电缆的卷绕长度:1.0米
• 长度测量分辨率:7.10-6米
• 制动器尺寸:0.1× 0.2 X 0.3米
• 制动器重量:2,5公斤
• 重量平衡:静态部分(机械,弹簧)
• 按钮数目:3个 (1个离合器,2个特定应用)
• 工具变换器:提供
应用范围:
适用于项目审查、人机工程学分析、功能测试、装配/拆卸、工作环境仿真、操作人员培训、医疗培训、远程外科手术等虚拟现实应用领域。