-
![Xsens:脊柱外科医生人体工程学分析,避免长时间工作中的意外受伤]()
Xsens:脊柱外科医生人体工程学分析,避免长时间工作中的意外受伤
随着大多数脊柱外科医生因工作而经历身体不适,医疗保健行业对人体工程学改进的需求越来越强烈。脊柱矫形外科医生Philip Louie致力于解决这一问题,利用Xsens运动捕捉技术和Scalefit软件来识别痛点并创建解决方案,以增强外科医生的身体健康和工作表现。
了解更多01-10 / 2025
-
![热门力反馈手套对比,机器人遥操作完美解决方案]()
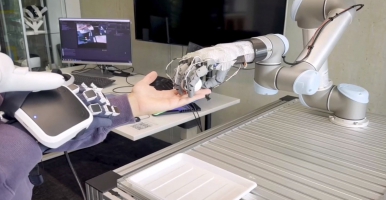
热门力反馈手套对比,机器人遥操作完美解决方案
随着机器人技术的快速发展,遥操作机器人作为代替人类在危险环境中完成高危任务或在医疗领域完成远程精密手术的完美解决方案,正在快速进步,并有望成为拥有巨大潜力的机器人行业的全新发展方向。
了解更多01-09 / 2025
-
![热门数据手套对比,参数、应用方向有何不同?]()
热门数据手套对比,参数、应用方向有何不同?
AI与人形机器人是目前市场中大热的两个新行业。在人形机器人或拟人仿真机器人制造与开发中动作捕捉技术的融入是必不可少的,通过将动捕数据与先进的AI大数据训练技术相结合,不仅能够省去枯燥乏味的动作编程过程大幅减少训练时间,还可以使训练出来的机器人动作更加自然更像真人,这有助于提升机器人未来在如家政、工厂装配等领域中与人交互时的情感表现,换句话说未来通过AI+动捕数据训练过的机器人将更加贴近人类。手是人
了解更多01-09 / 2025
-
![在 Unity 6 中为您的世界创建全局照明的新方法(三)]()
在 Unity 6 中为您的世界创建全局照明的新方法(三)
本文是Unity 6全局光照功能介绍系列中的最后一篇文章,在上篇文章中乐动网页版为大家介绍了关于使用沙漠绿洲场景创建实时光照的案例,在本文中乐动网页版将承接上篇文章继续为大家介绍如何使用Unity 6中的APV探针功能在URP管道中的另一个案例“花园场景”中创建实时光照具体流程,话不多说让乐动网页版马上开始吧。在花园场景中使用 APV 利用天空遮蔽功能天空遮蔽为管理场景中的光照转换提供了照明场景之外的另一种选择。它
了解更多01-09 / 2025
-
![惯性动捕技术优化人型机器人AI训练流程]()
惯性动捕技术优化人型机器人AI训练流程
人工智能与机器人技术的飞速发展让人型机器人逐渐从科幻概念转变为现实应用,成为未来智能生活的重要组成部分。为了实现人型机器人动作的精准与流畅,惯性动捕技术正逐步成为优化其AI训练流程的关键手段。惯性动捕技术是一种利用惯性传感器(如加速度计、陀螺仪等)捕捉人体运动数据的方法。相较于光学动捕技术,惯性动捕不受环境光线和空间限制,具有更高的便携性和灵活性。在人型机器人AI训练过程中,惯性动捕技术能够实时捕
了解更多01-05 / 2025
-
![Manus数据手套在人形机器人遥操作与AI数据训练中的应用实例]()
Manus数据手套在人形机器人遥操作与AI数据训练中的应用实例
2024年是人形机器人技术与AI技术大爆发的一年,特斯拉在今年发布了其未来将投入市场的人形机器人Optimus,与此同时国内人形机器人产业也正在快速发展。Manus数据手套作为一种高精度的人机交互设备,正在人形机器人的遥操作与AI数据训练中发挥重要作用。本文将介绍Manus数据手套在这些领域的应用实例,并探讨其带来的变革与影响。
了解更多12-23 / 2024